Electric Motors
Electric Motor Base Class
- class gym_electric_motor.physical_systems.electric_motors.ElectricMotor(motor_parameter=None, nominal_values=None, limit_values=None, motor_initializer=None, initial_limits=None)[source]
Bases:
RandomComponentAPI for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- electrical_jacobian(state, u_in, omega, *_)[source]
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.electrical_jacobian.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- electrical_ode(state, u_in, omega, *_)[source]
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.electrical_ode.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- i_in(state)[source]
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.i_in.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- initialize(state_space, state_positions, **__)[source]
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.initialize.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- next_generator()
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.next_generator.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- reset(state_space, state_positions, **__)[source]
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.reset.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- seed(seed=None)
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.seed.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- CURRENTS = []
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.CURRENTS.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- CURRENTS_IDX = []
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.CURRENTS_IDX.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- HAS_JACOBIAN = False
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.HAS_JACOBIAN.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- VOLTAGES = []
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.VOLTAGES.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property initial_limits
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.initial_limits.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property initializer
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.initializer.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property limits
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.limits.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property motor_parameter
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.motor_parameter.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property nominal_values
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.nominal_values.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property random_generator
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.random_generator.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property seed_sequence
API for
gym_electric_motor.physical_systems.electric_motors.ElectricMotor.seed_sequence.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
Synchronous Motors
Parameter Dictionary
Key |
Description |
Default |
|---|---|---|
r_s |
Stator Resistance in Ohm |
4.9 |
l_d |
d-axis inductance in Henry |
79e-3 |
l_q |
q-axis inductance in Henry |
113e-3 |
j_rotor |
Moment of inertia of the rotor |
2.45e-3 |
psi_p |
Permanent linked rotor flux |
0.165 |
p |
Pole pair Number |
2 |
All nominal voltages and currents are peak phase values. Therefore, data sheet values for line voltages and phase currents has to be transformed such that \(U_N=\sqrt(2/3) U_L\) and \(I_N=\sqrt(2) I_S\).
Furthermore, the angular velocity is the electrical one and not the mechanical one \(\omega = p \omega_{me}\).
- class gym_electric_motor.physical_systems.electric_motors.SynchronousMotor(motor_parameter=None, nominal_values=None, limit_values=None, motor_initializer=None)[source]
Bases:
ThreePhaseMotorAPI for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- electrical_jacobian(state, u_in, omega, *_)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.electrical_jacobian.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- electrical_ode(state, u_dq, omega, *_)[source]
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.electrical_ode.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- i_in(state)[source]
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.i_in.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- initialize(state_space, state_positions, **__)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.initialize.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- next_generator()
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.next_generator.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static q(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.q.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static q_inv(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.q_inv.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- q_inv_me(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.q_inv_me.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- q_me(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.q_me.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- reset(state_space, state_positions, **__)[source]
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.reset.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- seed(seed=None)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.seed.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static t_23(quantities)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.t_23.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static t_32(quantities)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.t_32.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- torque(state)[source]
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.torque.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- CURRENTS = ['i_sd', 'i_sq']
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.CURRENTS.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- CURRENTS_IDX = [0, 1]
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.CURRENTS_IDX.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- EPSILON_IDX = 2
- HAS_JACOBIAN = False
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.HAS_JACOBIAN.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- I_SD_IDX = 0
- I_SQ_IDX = 1
- VOLTAGES = ['u_sd', 'u_sq']
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.VOLTAGES.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property initial_limits
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.initial_limits.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property initializer
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.initializer.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property limits
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.limits.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property motor_parameter
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.motor_parameter.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property nominal_values
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.nominal_values.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property random_generator
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.random_generator.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property seed_sequence
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousMotor.seed_sequence.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
Synchronous Reluctance Motor
- class gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor(motor_parameter=None, nominal_values=None, limit_values=None, motor_initializer=None)[source]
Bases:
SynchronousMotorAPI for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- electrical_jacobian(state, u_in, omega, *_)[source]
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.electrical_jacobian.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- electrical_ode(state, u_dq, omega, *_)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.electrical_ode.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- i_in(state)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.i_in.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- initialize(state_space, state_positions, **__)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.initialize.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- next_generator()
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.next_generator.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static q(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.q.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static q_inv(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.q_inv.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- q_inv_me(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.q_inv_me.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- q_me(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.q_me.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- reset(state_space, state_positions, **__)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.reset.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- seed(seed=None)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.seed.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static t_23(quantities)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.t_23.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static t_32(quantities)
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.t_32.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- torque(currents)[source]
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.torque.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- CURRENTS = ['i_sd', 'i_sq']
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.CURRENTS.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- CURRENTS_IDX = [0, 1]
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.CURRENTS_IDX.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- EPSILON_IDX = 2
- HAS_JACOBIAN = True
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.HAS_JACOBIAN.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- IO_CURRENTS = ['i_a', 'i_b', 'i_c', 'i_sd', 'i_sq']
- IO_VOLTAGES = ['u_a', 'u_b', 'u_c', 'u_sd', 'u_sq']
- I_SD_IDX = 0
- I_SQ_IDX = 1
- VOLTAGES = ['u_sd', 'u_sq']
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.VOLTAGES.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property initial_limits
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.initial_limits.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property initializer
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.initializer.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property limits
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.limits.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property motor_parameter
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.motor_parameter.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property nominal_values
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.nominal_values.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property random_generator
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.random_generator.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property seed_sequence
API for
gym_electric_motor.physical_systems.electric_motors.SynchronousReluctanceMotor.seed_sequence.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
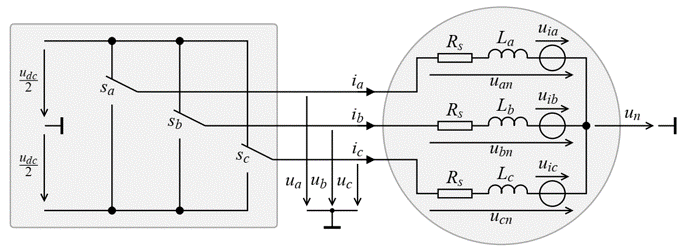
Permanent Magnet Synchronous Motor
The PMSM is a three phase motor with a permanent magnet in the rotor as shown in the figure [Boecker2018b]. The input of this motor are the voltages \(u_a\), \(u_b\) and \(u_c\).
The quantities are:
\(u_a\), \(u_b\), \(u_c\) phase voltages
\(i_a\), \(i_b\), \(i_c\) phase currents
\(R_s\) stator resistance
\(L_d\) d-axis inductance
\(L_q\) q-axis inductance
\(i_{sd}\) d-axis current
\(i_{sq}\) q-axis current
\(u_{sd}\) d-axis voltage
\(u_{sq}\) q-axis voltage
\(p\) pole pair number
\(\mathit{\Psi}_p\) permanent linked rotor flux
\(\epsilon\) rotor position angle
\(\omega\) (electrical) angular velocity
\(\omega_{me}\) mechanical angular velocity
\(T\) Torque produced by the motor
\(T_L\) Torque from the load
\(J\) moment of inertia
The electrical angular velocity and the mechanical angular velocity are related such that \(\omega=\omega_{me} p\).

The circuit diagram of the phases are similar to each other and the armature circuit of the externally excited motor.
For an easy computation the three phases are first transformed to the quantities \(\alpha\) and \(\beta\) and afterwards to \(d/q\) coordinates that rotated with the rotor as given in [Boecker2018b].

This results in the equations:
\(u_{sd}=R_s i_{sd}+L_d \frac{\mathrm{d} i_{sd}}{\mathrm{d} t}-\omega_{me}p L_q i_{sq}\)
\(u_{sq}=R_s i_{sq}+L_q \frac{\mathrm{d} i_{sq}}{\mathrm{d} t}+\omega_{me}p L_d i_{sd}+\omega_{me}p \mathit{\Psi}_p\)
\(\frac{\mathrm{d} \omega_{me}}{\mathrm{d} t}=\frac{T-T_L(\omega_{me})}{J}\)
\(T=\frac{3}{2} p (\mathit{\Psi}_p +(L_d-L_q)i_{sd}) i_{sq}\)
A more detailed derivation can be found in [Modeling and High-Performance Control of Electric Machines, John Chiasson (2005)]
The difference between rms and peak values and between line and phase quantities has to be considered at the PMSM. The PMSM is in star conncetion and the line voltage \(U_L\) is mostly given in data sheets as rms value. In the toolbox the nominal value of the phase voltage \(\hat{U}_S=\sqrt{\frac{2}{3}}U_L\) is needed. Furthermore, the supply voltage is typically the same \(u_{sup}=\hat{U}_S\). For example, a line voltage of \(U_L=400~\text{V}\) is given, the rms phase voltage is \(U_S=\sqrt{\frac{1}{3}}U_L = 230.9 \text{ V}\) and the peak value \(\hat{U}_S=326.6 \text{ V}\). The nominal peak current of a phase is given by \(\hat{I}_S=\sqrt{2} I_S\).

- class gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor(motor_parameter=None, nominal_values=None, limit_values=None, motor_initializer=None)[source]
Bases:
SynchronousMotorAPI for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- electrical_jacobian(state, u_in, omega, *args)[source]
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.electrical_jacobian.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- electrical_ode(state, u_dq, omega, *_)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.electrical_ode.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- i_in(state)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.i_in.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- initialize(state_space, state_positions, **__)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.initialize.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- next_generator()
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.next_generator.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static q(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.q.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static q_inv(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.q_inv.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- q_inv_me(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.q_inv_me.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- q_me(quantities, epsilon)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.q_me.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- reset(state_space, state_positions, **__)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.reset.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- seed(seed=None)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.seed.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static t_23(quantities)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.t_23.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- static t_32(quantities)
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.t_32.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- torque(currents)[source]
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.torque.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- CURRENTS = ['i_sd', 'i_sq']
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.CURRENTS.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- CURRENTS_IDX = [0, 1]
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.CURRENTS_IDX.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- EPSILON_IDX = 2
- HAS_JACOBIAN = True
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.HAS_JACOBIAN.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- IO_CURRENTS = ['i_a', 'i_b', 'i_c', 'i_sd', 'i_sq']
- IO_VOLTAGES = ['u_a', 'u_b', 'u_c', 'u_sd', 'u_sq']
- I_SD_IDX = 0
- I_SQ_IDX = 1
- VOLTAGES = ['u_sd', 'u_sq']
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.VOLTAGES.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property initial_limits
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.initial_limits.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property initializer
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.initializer.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property limits
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.limits.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property motor_parameter
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.motor_parameter.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property nominal_values
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.nominal_values.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property random_generator
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.random_generator.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.
- property seed_sequence
API for
gym_electric_motor.physical_systems.electric_motors.PermanentMagnetSynchronousMotor.seed_sequence.Note
The original docstring is temporarily suppressed due to formatting issues upstream. Once it’s cleaned, we’ll restore the full text here.